



Material Selection
For our final prototype we leveraged each material to their strengths, minimizing the amount of material that was needed. For unique/purpose built parts we modeled and made 3D printed parts making sure to establish a set of common dimensions such as common offsets and required clearances. Aluminum extrusion was able to provide for both structural and precise applications, so we used it to mount sliding components as well as to brace the overall structure.

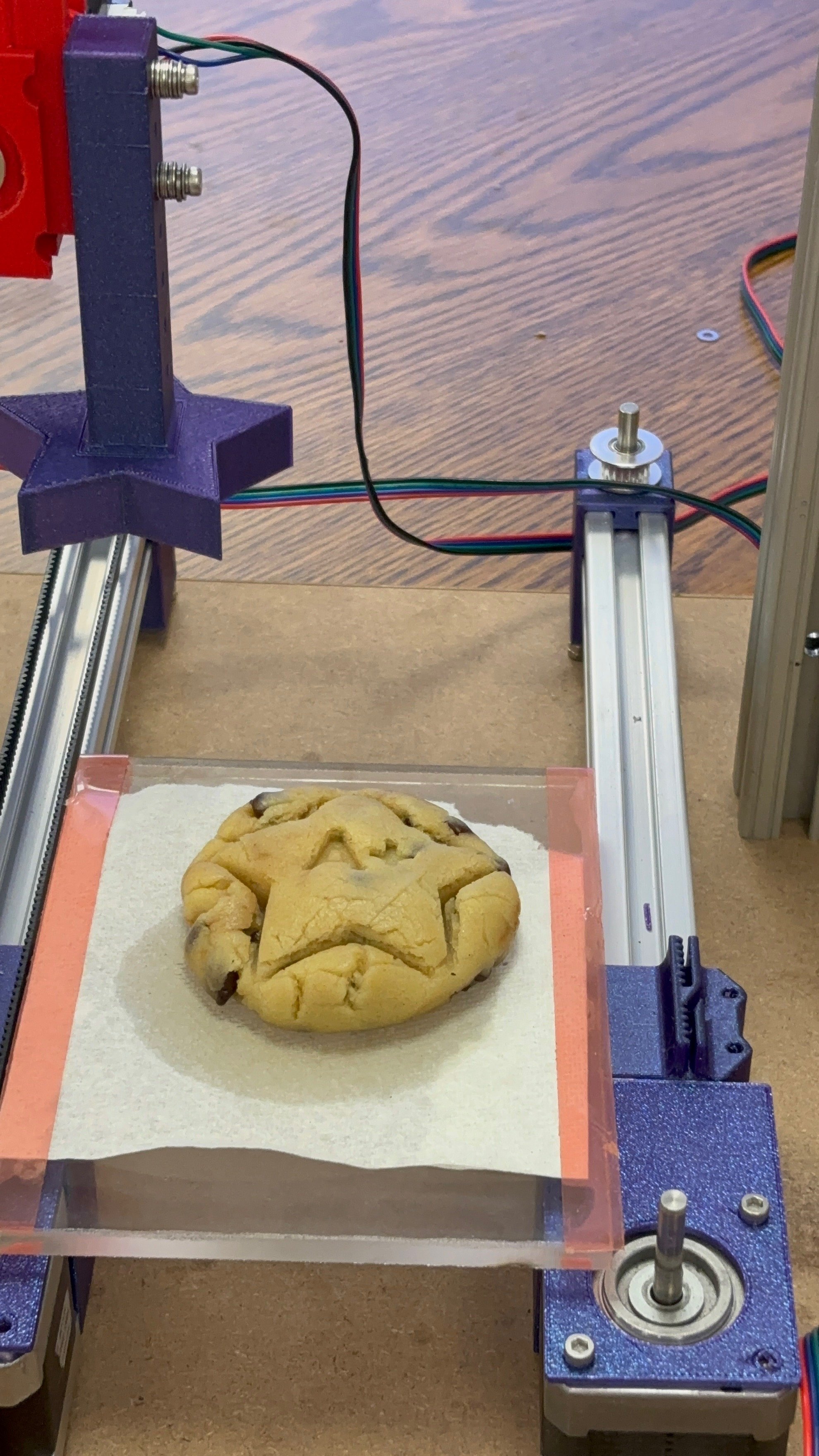
2.5D Cartesian Robot Cookie Cutter

As our final project we designed our own specialized 2.5D cartesian robot. We were frustrated with the overall lack of precision that cutting cookies by hand yields and we believe we have the perfect solution. The robot articulates a table, a sliding gantry, and a mounted plotter to raise and lower our custom-made “A+” cookie cutter.
Stepper Fundamentals
This project was reliant on our understanding of stepper motors and being able to design components to fit real world parts. we were able to spring board off of our previous designs for a pen plotter mechanism using a rack and pinion, repurposing it to to hold cookie cutter attachment by simply threading in with two screws. During that assignment we programmed an Arduino to operate a stepper motor by controlling the poles directly through each pin output. It allowed us to conceptualize the stepper motor as a tool for precise movement and we relied heavily on their ability to drive timing belts for our moving components.


Design and Fabrication Choices
While our prototype is very reminiscent of a 3D printer, there are a few key differences that allowed us to complete this project successfully and on time. For example, we relegate Z-axis control to the plotter mechanism mounted on a fixed gantry, simplifying the design since it did not require a screw rod assembly. Additionally, in cases where dimensionality was paramount, such as for the sliding table, we utilized CAM tools like laser cutting to align our parts properly so that they didn’t twist or seize.